Active inference as a model of collision avoidance behavior in human drivers
DRANK
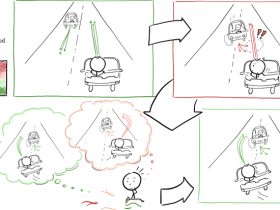
This work presents a computational model of human driver collision avoidance based on active inference, simulating response selection, timing, and execution across multiple driving scenarios and reproducing key patterns observed in empirical human data.